机组设计中电子膨胀阀的选择1:
节流机构是制冷系统中最重要的部件之一,节流机构与系统其他主要部件的良好匹配是改善系统运行并适应系统负荷变化的基础。
电子膨胀阀(EXV)作为节流元件在大型压缩式制冷装置(如风冷冷水机组、水冷冷水机组、屋顶式空调器等)中得到广泛应用。精确控制、信号反馈是电子膨胀阀的优点。此外,使用电子膨胀阀的系统在停机后,可以通过适当的控制使机组高、低压平衡,或完全关闭电子膨胀阀,起到截止阀的作用。
电子膨胀阀选型模型:
首先,需了解电子膨胀阀在系统中的位置和作用(见图1)。电子膨胀阀用于系统中,起到节流的作用。通过控制器感知到的相关信息,对系统进行精确控制。
对于给定的系统,选择合适的电子膨胀阀可以用以下步骤:
1.对制冷剂在电子膨胀阀及系统内的流动,搭建适当的系统模型。
2.选择运行图上的点,作为计算对比点。例如额定点和系统运行边界点。
3.根据系统模型计算出系统制冷剂流量以及饱和蒸发温度,冷凝温度和电子膨胀阀前后压降等数据,用于电子膨胀阀的选型。
电子膨胀阀选型分析:
首先,需要知道电子膨胀阀的能力,也就是它的适用范围。
由于多数电子膨胀阀都由步进装置驱动。了解电子膨胀阀的运行步数与能力之间的关系至关重要。
本例中选用某型号电子膨胀阀为例。我们可以看到:电子膨胀阀都有一定的精确控制范围,一般情况下, 这个范围从10%到100%。如果超出了这个范围,电子膨胀阀的控制将受到很大的影响,即不能精确控制。
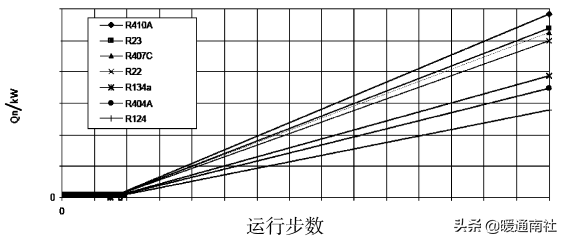
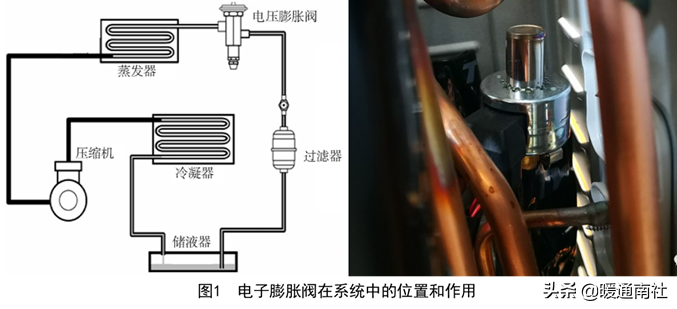
图2 电子膨胀阀用于不同制冷剂的能力差异
那么如何确定电子膨胀阀的能力呢?
首先需要确定该电子膨胀阀适用于什么制冷剂,对于不同的制冷剂,同一个电子膨胀阀表现出来的能力会有很大的差异。从上图中,可以发现,对于同一个电子膨胀阀,使用R410A表现出来的能力最大;而对于R134a和R124等制冷剂系统,电子膨胀阀的能力将有很大的下降。
其次,需要了解那些因素影响电子膨胀阀的选择。
1)电子膨胀阀进口的液体制冷剂温度;
2)饱和蒸发温度;
3)电子膨胀阀两端的压降;
4)静态过热度设定值;
5)过热度的改变量。
知道了这些因素后,才能进入具体的计算。
再有,必须了解电子膨胀阀的压力适用范围,即MOP。对于高压制冷剂如R410A,MOP是选择电子膨胀阀时的障碍。只有满足了基本MOP的要求,才能进入到备选行列。
3 理论和试验验证
理论验证:通过理论计算并将结果反映在系统运行图上。对于固定的制冷剂和制冷系统,选择两种型号的电子膨胀阀,进行理论计算。
在一定的冷凝,蒸发和液体温度下,做出对比。
试验验证。通过适当的不同负荷的试验,如变负荷动态加载试验等,验证电子膨胀阀的控制能力。这也是对理论计算的进一步确认。
图3 对比不同型号电子膨胀阀在系统中的能力
4 控制
电子膨胀阀的动作,在很大程度上离不开精确的控制。
对于给定的控制系统,需要电子膨胀阀能够给与很有效的匹配,也就是使电子膨胀阀成为控制系统的一部分。
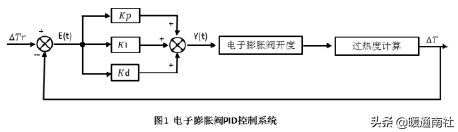
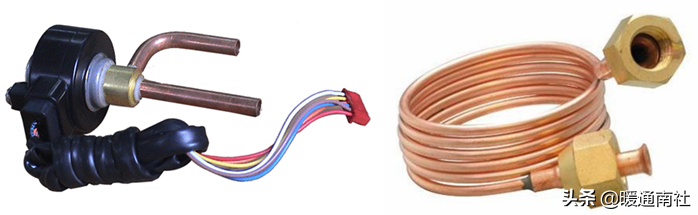
驱动模块需要一个X-XXmA或X-XXV的模拟信号输入(如图4和图5)。根据模拟输入信号产生输出信号使电子膨胀阀关闭/打开以控制液体或气体制冷剂的流量。采用任何需要的控制器与通用驱动模块配合就可以实现不同的功能。
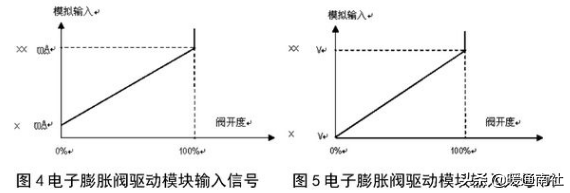
设置适当的模拟输入信号,使阀的开度在一定的范围内得到精确控制。
电子膨胀阀 PID 控制算法在空调系统中的应用2
空调系统的能效比更加趋向于全年能效比,而不是单纯的标准工况的COP,在这种情况下,无论是定速空调,还是变频空调,都需要选择一个可以宽泛精准的流量调节元件,而电子膨胀阀是能够适应以标准电信号传递信息的电子型控制元件,具有与装置相适应的良好特性。电子膨胀阀可以根据预定的调节控制动作, 进行空调系统的循环量调节,保证蒸发器始终在非常小的出口过热度下稳定工作,大大改善制冷系统变负荷动态特性。就控制系统组成而言,主要有过热度闭环反馈PID控制和排气温度闭环反馈PID控制。考虑到排气温度闭环反馈PID控制无法使用在多联机的空调系统的缺陷,针对过热度闭环反馈PID控制应用进行了最优控制器设计方法对其参数进行了设定,获得了最优PID控制器,在不同空调产品上进行了测试和验证。
闭环反馈 PID 控制算法:
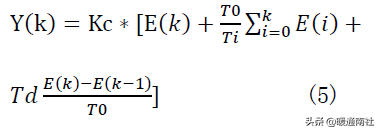
电子膨胀阀的PID控制系统框图如图1所示。电子膨胀阀采用单对级步进电机驱动的形式。函数Y(t)是调节器输出信号,它相应于步进电机给出的开度;系统的输出是控制参数过热度∆T;函数E(t)是∆T与目标过热度∆Tr的偏差;电子膨胀阀开度到过热度的计算的传递过程,需要空调系统在运行中通过温度传感器采样来实现∆T的计算。
过热度计算:
通过对应电子膨胀阀开度的作用下,空调系统进入换热过程。基于蒸发器的温度传感器T1以及蒸发器出口温度传感器T2(如果没有,就采用压缩机吸气温度传感器),来计算蒸发器过热度,过热度计算函数为:
∆T=a∗T2−b∗T1+c (1)
式中,T1-蒸发器温度,T2-蒸发器出口温度;
a,b,c 为负荷变化时过热度计算用补正系数。
目标过热度的设定:
空调系统的最适过热度会因为运转模式的不同(制冷,制暖)以及负荷的不同而产生变化,为了使目标过热度更加的接近最适过热度,我们设计有目标过热度的计算函数如下:
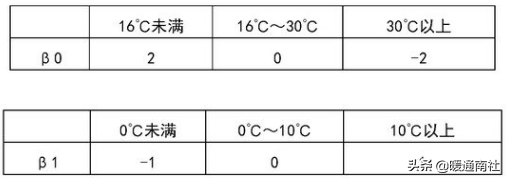
制冷时:∆Tr=∆Tr0+β0 (2)
制暖时:∆Tr=∆Tr1+β1 (3)
其中,∆Tr0,∆Tr1,β0,β1分别根据系统的不同设定不同的值。
调节器输出函数
根据连续 PID 控制器的函数:
式中,T1-蒸发器温度,T2-蒸发器出口温度。
A,b,c 为负荷变化时过热度计算用补正系数。
式中,Kc-比例系数;Ti-积分常数;Td-微分常数;
为了便于利用PLC程序来实现 PID控制,我们取采样周期为T,将连续形式的方程离散化,则PID控制器的函数(1)变为:
对于空调系统而言,系统稳定的时间还是进一步将式(5)转化成为增量形式,有
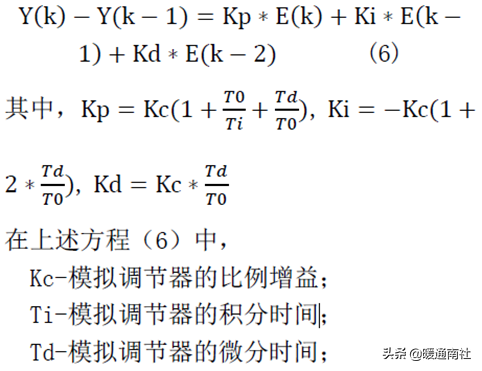
T0-模拟调节器的采样周期;
采样周期T0是两次采样之间的间隔,从硬件设计考虑,采样周期尽可能长些,这样可以降低对A/D和 D/A 精度和速度以及CPU计算速度的要求。但是这将会使系统反应比较滞后,控制误差比较大,控制品质变差。从控制性能考虑,采样周期尽可能短些,使数字控制更接近连续的模拟系统。目前对采样周期的选择尚没有理论根据充分,使用简单有效的方法,大多采用实验加分析的办法确定。对于空调系统而言,一般采样周期为1s~5s之间,目前我们采用的是3.5s作为采样周期。
PID 参数的选择:
比例调节作用能加快闭环响应,具有克服干扰的能力,是最基本的调节规律。积分调节消除余差,使闭环系统响应升阶,响应速度变慢。改进闭环响应速度要以比较大的超调量和长时间的振荡为代价。微分调节使闭环系统响应速度减小和增加衰减。
在调节中,Kc太小,被调参数余差大,调节时间也很长;Kc太大,会导致系统激烈振荡甚至不稳定。积分时间 Ti 减少将增大响应速度,同时提高超调量和长时间的振荡,T1增大则响应速度变慢。而微分时间 Td 增大,稳定性提高;但是Td超出一定量后,系统会变得不稳定。
对于空调系统而言,以下为调节器参数经验数据,请参考:Kc:5.0~15.0,Ti:20s~60s,Td:30s~80s。
电子膨胀阀开度处理方法:
对于空调系统而言,系统稳定的时间还是比较长的,如果采样周期为3.5s时,系统反应太快,反而会导致空调系统不稳定而影响舒适性,所以我们对于电子膨胀阀的执行开度分为多个阶段进行处理。
膨胀阀初始开度:
根据不同的空调系统以及运行模式的不同,一般采用实验的方法确定膨胀阀的初始Ti-模拟调节器的积分时间;Td-模拟调节器的微分时间;
开度,根据经验我们设计有以下计算方式:
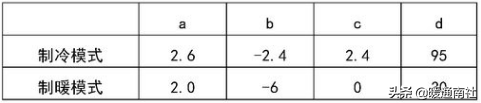
初始开度=a*循环量+b*室外气温+c*室内气温+d (7)
其中,a,b,c,d 需要通过各种工况下的实验数据来统计得到,这里就不再阐释。
膨胀阀开度上升判定阶段:
为了维持空调系统的稳定性,我们通过多次采样来确定膨胀阀开度是否上升。如果膨胀阀开度进入上升判定阶段必须满足以下条件:
① Y(k)-Y(k-1)>0;
② E(k) >0;
如果以上两个条件任意一个不满足,都将要跳出上升判定阶段。
膨胀阀开度下降判定阶段:
同样如果膨胀阀开度进入下降判定阶段必须满足以下条件:
③ Y(k)-Y(k-1)<0;
④ E(k)<0;
如果以上两个条件任意一个不满足,都将要跳出上升判定阶段。
膨胀阀开度稳定判定阶段:
只要以下两个条件中的任意一个满足,就判定为稳定判定阶段:
⑤ Y(k)-Y(k-1)=0;
⑥ E(k)=0;
膨胀阀开度执行阶段:
为了维持空调系统的稳定性,膨胀阀开度执行的周期一般设定为60s~120s之间,根据对两种空调系统的实验研究,采用的是90s作为执行周期基本满足稳定性的要求。
如果确定进入膨胀阀开度上升或者下降判定阶段,就以下记膨胀阀的开度变化量进行变化:
开度变化量=Y(k)-Y(k-1) (8)
如果确定进入膨胀阀开度稳定判定阶段,膨胀阀的开度维持上一次的开度不变。
控制算法的参数设定:
为了确保整个膨胀阀控制算法比较精准的控制空调系统的运行,最佳的调整进入蒸发器制冷剂的流量,需要对该控制算法的参数设定有比较深刻的了解,并且准确的设计该参数才可以使过热度取到最佳状态,下面对各个阶段的参数设定进行解释。
过热度计算:
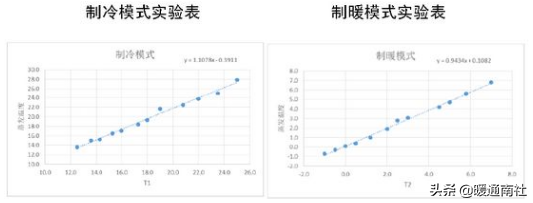
考虑到蒸发器到压缩机的吸入口的配管距离,会产生一定的压损,以及温度传感器的位置不同,过热度的计算也会产生差别,从而需要有一些补正的参数,式(1)中的参数通过实验得到以下实验结果:
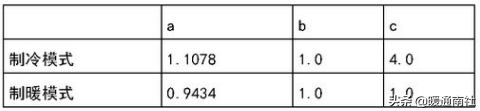
以下为通过不同的蒸发器传感器温度来测试蒸发温度的实验统计结果:
目标过热度计算
因为系统的不同,可能室内机和室外机的连接配管长短不一,空调器的温度传感器的位置不同也会导致目标过热度存在差别,为了实现该控制方法的通用性,所以设计有以下的补正方式,基本满足各种空调器的调节范围。
制冷模式:∆Tr0=5.0
制暖模式:∆Tr1=0.5
根据环境不同,对于β0,β1有以下参数设定:
调节器输出函数:
经过实验测试,设计有以下参数结果:
控制流程:
对电子膨胀阀供电后,电子膨胀阀的控制动作开始,为了确保电子膨胀阀的开度稳定性,首先对电子膨胀阀进行初始化的处理,初始化处理完成后,有些空调系统还设计有膨胀阀启动开度的设定,有些空调系统没有该过程,然后进入初期膨胀阀开度,从进入初期膨胀阀开度开始,膨胀阀的PID控制就开始执行,首先是对稳定,上升,下降的判定,为了PLC程序的可操作性,设计有先后顺序为:稳定-上升-下降的判定,如果进入稳定阶段,就执行膨胀阀开度维持;进入上升判定阶段,就执行膨胀阀开度上升;进入下降判定阶段,就执行膨胀阀开度减少;膨胀阀开度执行之后,又再次的进入判定阶段,于此往复,可以确保空调系统符合发生变化时,膨胀阀相应的调整流量,达到最佳的空调运行系统。具体软件流程图如下:
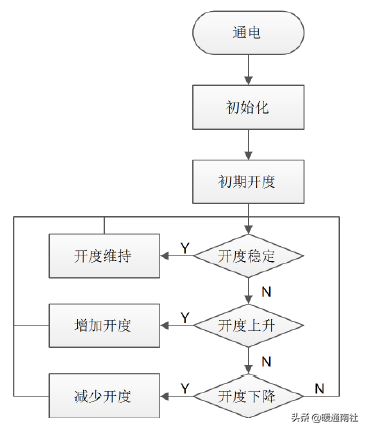
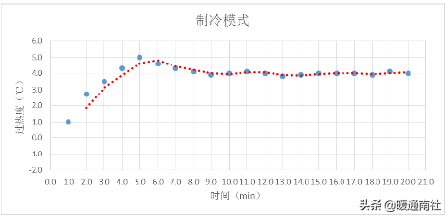
实验结果:
取标准制冷工况下,一定循环量下在制冷模式下,取得的过热度与时间的关系如下:大概需要8分钟的时间可以让空调器达到稳定的过热度,从而实现性能的最优化。满足了我们的设计需求。
毛细管与电子膨胀阀的节流特性对比:3
节流部件作为热泵系统中循环工质流量的调节部件,它对系统是否稳定运行有着重要的影响。
流量控制特性:
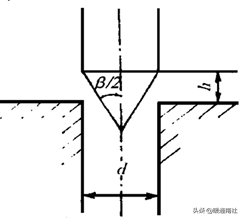
毛细管流量特性:


电子膨胀阀流量特性:
由线圈上施加的电压控制针阀开度的大小,从而调节膨胀阀的流量,两端压差越高,开度越大,流量也就越大。
以空气能热泵热水器运行原理为例:
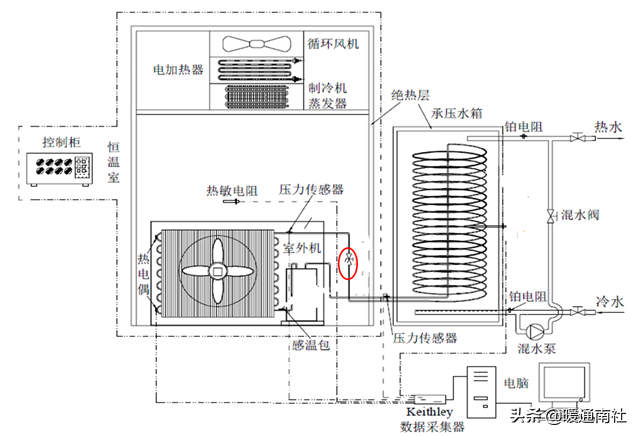
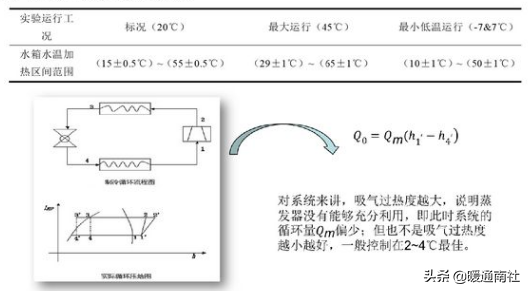
热泵热水器需要一年四季运行,运行的环境温度范围宽,而水温由低温加热到高温变化区间也很大。毛细管系统运行范围窄,电子膨胀阀系统运行范围宽。
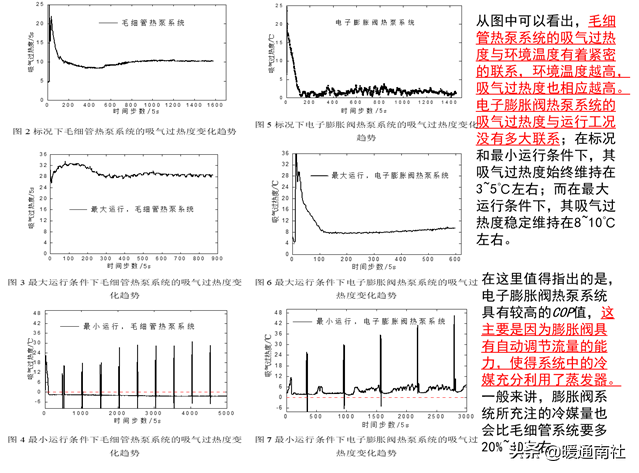
不同工况下的吸气过热度变化趋势:
定义:吸气过热度为压缩机吸气口处的温度与蒸发器入口处温度的差值。
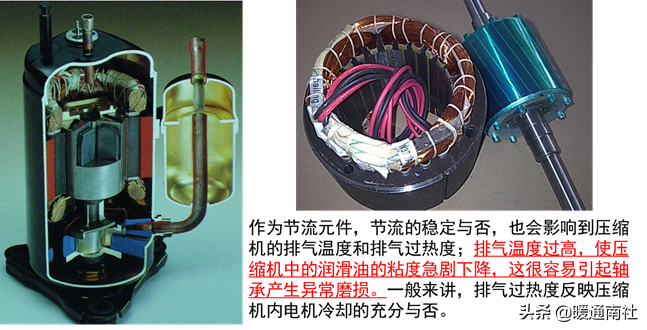
不同工况下的排气温度和排气过热度变化趋势:
定义:排气过热度为压缩机排气出口处的温度与排气压力所对应饱和冷凝温度的差值。
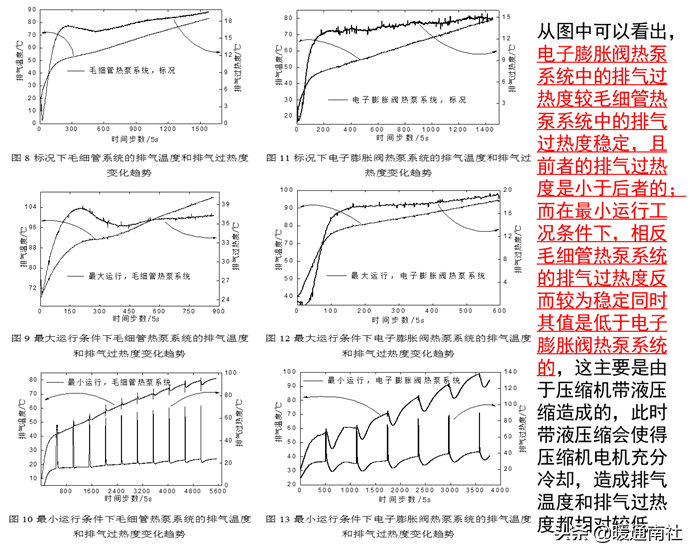
1、在标况和最大运行条件下,电子膨胀阀热泵系统的吸气过热度、排气过热度和排气温度都是小于毛细管热泵系统的,而且前者的吸气过热度和排气过热度是较后者稳定的,说明电子膨胀阀的节流特性是优于毛细管的。
2、在标况条件下,电子膨胀阀热泵系统与毛细管热泵系统相比,前者具有较高的COP值,说明其系统充分利用了蒸发器的换热面积。
3、在最小运行条件下,毛细管热泵系统的压缩机存在带液压缩的可能,这主要是由毛细管的节流控制能力弱造成的;相反电子膨胀阀热泵系统中的吸气过热度和排气过热度都能保持者较为稳定的值,说明其恶劣工作条件下也能保持着良好的节流能力。
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至举报,一经查实,本站将立刻删除。

投诉举报

平台公司是什么公司(平台公司和国企的区别)

创业融资需求有什么特点(创业风险融资的特点
小灵通创始人(当年叱咤风云的小灵通之父现状
新加坡注册公司(新加坡公司注册条件流程攻略
有营业执照可以申请创业基金吗(青年创业促进
大学生创业计划书封面图片(创业项目策划书模